|
|
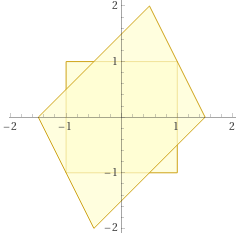
Data la matrice A, la funzione F e il quadrato seguenti,
(a) traccia il trasformato del quadrato mediante F,
(b) traccia il sistema di riferimento i cui versori degli assi sono
i trasformati mediante F dei versori del sistema di riferimento di partenza,
|
(c) determina l'equazione che rappresenta nel piano x,y la curva raffigurata a lato,
che nel piano X,Y ha equazione | | |||||||||||||||||||||
|
| (a,b) F(x,y) = (x-y/2, x+y) trasforma (1,1) in (1/2,2), (-1,1) in (-3/2,0),
(-1,-1) in (-1/2,-2) e (1,-1) in (3/2,0), come illustrato nella figura a fianco,
sulla quale sono tracciati anche i versori (F(1,0) = i+j e F(0,1) = -1/2i+j) del nuovo sistema di riferimento. (c) La matrice A esprime le vecchie coordinate x,y in funzione delle nuove X,Y; quindi dobbiamo fare la sostituzione x = X-Y/2, y = X+Y nella equazione (2/3x + y/3)(-2/3x + 2/3y)=1; otteniamo: (2/3(X-Y/2) + (X+Y)/3)(-2/3(X-Y/2) + 2/3(X+Y))=1 (2/3X - Y/3 + X/3 + Y/3)(-2/3X + Y/3 + 2/3X + 2/3Y)=1 X·Y=1 questa è l'equazione della curva (è un'iperbole) nel nuovo sistema. |  |
| Nota che i punti (1,1) e (-1,-1) nel piano X,Y dell'iperbole sono due vertici del quadrato trasformato. Se trasformassimo la curva (espressa nel piano x,y) con la trasformazione associata alla inversa di A otterremmo la curva x·y=1, ossia l'usuale iperbole equilatera. | |
[per considerazioni più generali puoi vedere qui]
I poligoni tracciati col software online WolframAlpha: