1. I primi modelli differenziali
2. Equazioni differenziali del 1º ordine
3. Soluzione grafica e numerica delle equazioni differenziali del 1º ordine
4. Equazioni differenziali del 2º ordine
5. Equazioni alle derivate parziali
6. Esercizi
 Sintesi
SintesiModelli differenziali
0. Premessa
1. I primi modelli differenziali
2. Equazioni differenziali del 1º ordine
3. Soluzione grafica e numerica delle equazioni differenziali del 1º ordine
4. Equazioni differenziali del 2º ordine
5. Equazioni alle derivate parziali
6. Esercizi
Sintesi
0. I Premessa
Abbiamo visto come, data una funzione, se ne può studiare la variazione utilizzando le sue derivate prima, seconda, …. In questa scheda vedremo, viceversa, che da informazioni su come varia una funzione si possono dedurre informazioni sulla funzione stessa. Il primo paragrafo illustra in breve il contenuto della scheda e, in gran parte delle scuole, è sufficiente per avere un'idea di che cosa siano, a che cosa servano e come si studino i "modelli differenziali". I paragrafi successivi sono di approfondimento, per alcuni tipi di scuole.
1. I primi modelli differenziali
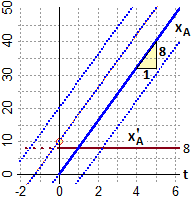
Suppongo di sapere che un corpo A si muove alla velocità costante di
So che d xA / dt = 8. Posso dedurre che xA = 8·t, come appare anche sul grafico. Ma questa soluzione corrisponde al fatto che xA(0) = 0, mentre non avevo alcuna informazione sulla posizione di partenza del corpo.
Potrebbe essere anche che xA(0) = 10 (vedi il punto cerchiato) o xA(0) = 20, a cui corrisponderebbero le equazioni
|  |
Suppongo, ora, di sapere che un corpo B si muove alla velocità crescente di
Dunque
d xB / dt = 3·t + 1.5.
Posso dedurre che
xB = 3/2·t² + 1.5 t.
Ma, anche in questo caso, è una soluzione (rappresentata sopra a destra) che corrisponde al fatto che
Se astraggo dal contesto, posso tradurre alcuni dei problemi visti sopra in questi modi:
(1) So che f '(x) = 8. (a) Che cosa posso dedurre su f? (b) E se, ad es., so che f(0) = 10?
(a) Che f è del tipo f(x) = 8·x + c. (b) 8·0+c = 10, quindi c=10 e f(x) = 8·x+10.
(2) So che f '(x) = 3x+3/2. (a) Che cosa posso dedurre su f? (b) E se, ad es., so che f(0) = −10?
(a) Che f è del tipo f(x) =
3/2·x² + 3/2 x + c.
(b) 3/2·0+3/2·0+c = −10, quindi c=−10 e f(x) =
3/2·x² + 3/2 x − 10.
Consideriamo un'altra situazione. Un'automobile C all'istante t è nella posizione xC(t), dove t è espresso in secondi.
Indichiamo questa posizione, espressa in metri, più semplicemente con
Conoscendo l'accelerazione posso dedurre qualche informazione sulla velocità: s'(t) potrebbe essere 5·t o 5·t+5
o 5·t−3 o, in generale, 5·t + h.
Se s'(t) = 5·t potrei dedurre (come fatto sopra per xB) che s(t) = 2.5·t² + k.
In generale, se s'(t) = 5·t + h posso dedurre che
s(t) = 2.5·t² + h t + k
Da che cosa dipendono i valori di h e di k? Pensiamo, prima, al problema. Conosco l'accelerazione dell'auto. La sua posizione al variare del tempo da che cosa dipende?
Sicuramente dalla posizione iniziale, cioè
Astraendo dal contesto posso descrivere il problema così:
(3) So che f "(x) = 5. (a) Cosa posso dedurre su f '? (b) e su f ?
(c) E se, ad es., so che f '(0) = 1 e che
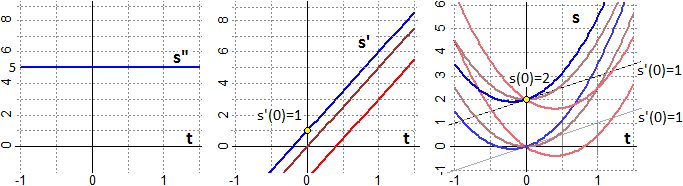
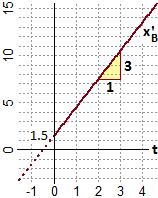
Da s"(t) = 5 posso ricavare che s'(t) = 5·t + h. Vedi la
figura soprastante a sinistra.
Deduco che s' in funzione di t ha il grafico di una retta con pendenza 5. Vedi la figura al centro. So che s'(0)=1; posso quindi individuare una particolare
espressione di s': da s'(0) = 5·0 + h = 1
ricavo che h = 1. Nella figura la s' soluzione è in colore blu.
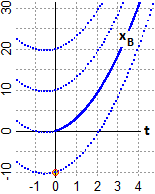
Da s'(t) = 5·t + h ricavo
s(t) = 2.5·t² + h·t + k.
Sopra a destra sono rappresentate diverse di queste curve. Ne sono evidenziate, in blu, due che corrispondono a s'(0) = 1, ossia a
h = 1. Se so che s(0)=2 ne indivuo una sola: da
s(t) = 2.5·t² + t + k
ottengo 2.5·0² + 0 + k = 2,
da cui k = 2; la soluzione è
s(t) = 2.5·t² + t + 2.
Equazioni come f '(x) = 8, f '(x) = 3x+3/2 e f "(x) = 5, in cui l'incognita è una funzione (f) che compare sotto un simbolo di derivazione (derivata prima o seconda o …) vengono chiamate equazioni differenziali (ricordiamo che la derivata viene chiamata anche coefficiente differenziale). Come abbiamo visto una equazione differenziale ha infinite soluzioni. Per avere un'unica soluzione dobbiamo affiancare alla equazione delle condizioni sui valori che essa, e le sue derivate successive, assumono in alcuni punti. Un'equazione differenziale affiancata da indicazioni di questo tipo viene chiamata modello differenziale.
Ad esempio s"(t) = 5, s'(0) = 1, s(0) = 2, ossia l'equazione differenziale s"(t) = 5 assieme alle condizioni
|
Un altro esempio. Quali sono le funzioni che hanno come derivata
sé stesse? A questo problema corrisponde il modello differenziale A destra sono rappresentate alcune funzioni di questo tipo. In blu è rappresentata la soluzione dell'equazione differenziale che si ottiene imponendo la condizione | 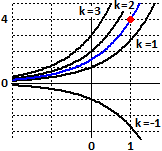 |
Anche molti modelli differenziali possono essere risolti utilizzando WolframAlpha. Ad esempio nei casi precedenti basta che metta come input,
rispettivamente,
Posso anche trovare valori particolari senza copiare e mettere in input la soluzione, con, ad esempio:
Abbiamo già incontrato, negli anni scorsi, delle equazioni differenziali?
Se ci ripensiamo, la antiderivata o primitiva di una funzione F
non è altro che una soluzione G dell'equazione differenziale
Invece di scrivere
Qualche breve considerazione storica. Lo studio delle prime equazioni differenziali risale alla fine del XVII secolo, quando, da Newton e Leibniz, venne individuato il teorema fondamentale dell'analisi (vedi), che ha messo in relazione la derivazione e l'integrazione. Emerse, presto, il problema che, a differenza della derivazione, per la quale esiste un procedimento standard per associare ad una funzione la sua funzione derivata, non c'è una tecnica standard per associare ad una funzione le sue antiderivate. Si deve arrivare al XVIII secolo per la messa a punto di tecniche specifiche per la risoluzione di varie classi di equazioni differenziali e per la dimostrazione di alcuni teoremi che assicurano l'esistenza delle soluzioni di equazioni differenziali che soddisfano certe condizioni generali. Di questi aspetti ti occuperari se proseguirai gli studi in ambito matematico o fisico. Qualche approfondimento sui modelli differenziali lo puoi trovare nei prossimi paragrafi.
2. Equazioni differenziali del 1º ordine
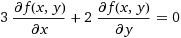
L'equazione differenziale s"(t) = 5, così come l'equazione differenziale
Soffermiamoci
sulle equazioni differenziali del 1º ordine. Esse in generale sono delle equazioni in cui, indicata con F la funzione incognita e con x la variabile di
input, compare
(c) sale'(t) = 0.01 − sale(t)/100 (d) y'(x) = x − y(x)
Sotto sono rappresentati i campi direzionali (o campi di pendenza, slope fields in inglese) associati alle
equazioni differenziali precedenti: data un'equazione
Nel caso (a) sono tutte le funzioni t → 3/2·t² + 3/2·t + k. Nella figura
è evidenziata la particolare soluzione che in 0 vale −10, che come abbiamo visto corrisponde a k = −10.
Nel caso (b) sono tutte le funzioni
| (a) | 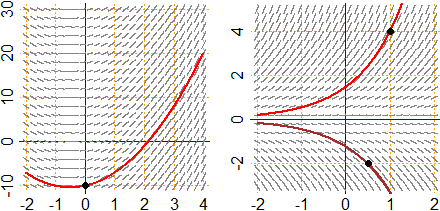 |
(b) |
Consideriamo il caso (c). Esso corrisponde al seguente problema.
Un recipiente contiene 100 litri di una soluzione contenente 5 kg di sali.
Viene fatta entrare, con la portata di
Quanto sale rimane nel recipiente dopo un'ora?
Indichiamo con sale(t) il sale in kg presente al minuto t-esimo.
Quindi
Il flusso di sale in entrata è dunque
Riassumendo all'inizio sale(0) = 5; poi il flusso di sale è 0.01 − sale(t)/100.
Utilizzando la derivazione il flusso è sale'. Quindi il problema di riduce al seguente modello differenziale:
sale'(t) = 0.01 − sale(t)/100, sale(0) = 5.
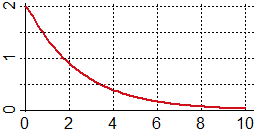
Nella figura seguente a sinistra è tracciato il campo direzionale di sale'(t) = 0.01 − sale(t)/100 ed
è evidenziata la soluzione che corrisponde alla condizione
| (c) | 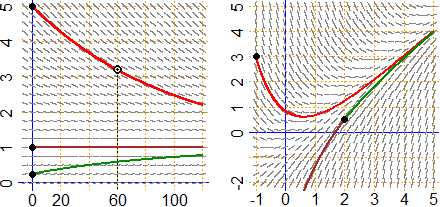 |
(d) |
La figura a destra rappresenta il campo direzionale di y'(x) = x − y(x) e due soluzioni
particolari, quella che corrisponde alla condizione
Nel prossimo paragrafo vedremo come risolvere graficamente e numericamente queste equazioni differenziali usando il computer.
3. Soluzione grafica e numerica delle equazioni differenziali del 1º ordine
Qui puoi trovare alcuni algoritmi per risolvere graficamente e numericamente le equazioni differenziali usando R. Potrai poi usare essi od eventualmente altri algoritmi analoghi che ti fornirà il docente.
4. Equazioni differenziali del 2º ordine
Questo argomento, toccato in alcune scuole, è difficile da affrontare nella scuola secondaria superiore. Qui ci limitiamo ad illustrare qualche esempio, rinviando a questo documento per illustrare come il computer potrebbe essere impiegato alla fine della scuola superiore per avviarne lo studio.
Il primo esempio rappresenta
l'equazione differenziale che esprime la posizione di un oggetto sottoposto ad una forza
che sia proporzionale (con un fattore di proporzionalità negativo) alla distanza
da una posizione fissata; potrebbe essere un oggetto fissato ad una molla. Se y è la distanza (in una opportuna unità di misura)
e x il tempo (in una opportuna unità di misura), la relazione è del tipo
| y"(x) = -4*y(x), y(0)=2, y'(0)=0 | 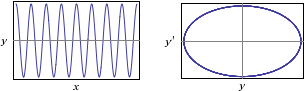 |
Gli esempi successivi sono riferiti a situazioni simili alla precedente in cui perň, nel primo caso, l'oggetto viene spinto ad ogni passaggio, aumentando l'ampiezza delle oscillazioni, e, nel secondo, si è in presenza di un fluido che smorza le oscillazioni.
| y"(x) = -4*y(x)+cos(2*x), y(0)=2, y'(0)=0 | 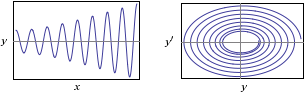 |
| y"(x) = -4*y(x)-y'(x), y(0)=1, y'(0)=3 |  |
5. Equazioni alle derivate parziali
Le equazioni differenziali alle derivate parziali (ossia che coinvolgono le derivate parziali della funzione incognita rispetto a più di una variabile), a differenza di quelle ordinarie, hanno soluzioni che non dipendono da costanti arbitrarie ma da funzioni arbitrarie. Sono usate soprattutto per affrontare alcuni argomenti di fisica. Ci limitiamo ad alcuni esempi.
|
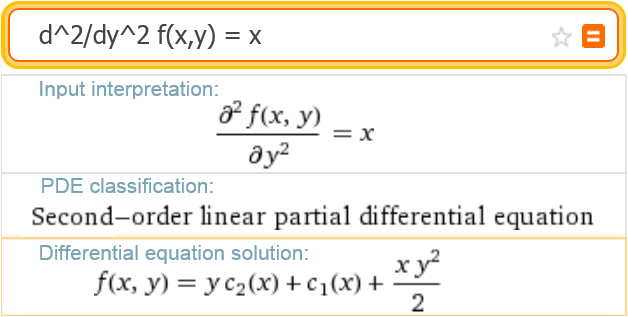
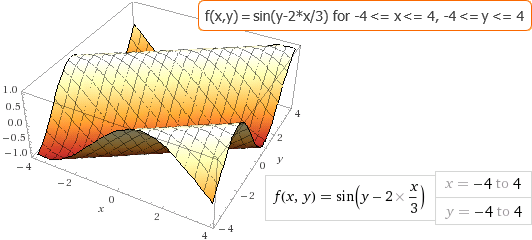
Vediamo un primo esempio di equazione alle derivate parziali (l'incognita è f):
Siamo in grado di risoverla direttamente: la derivata rispetto a y di
Verifichiamo la cosa con WolframAlpha (vedi la figura a fianco):
introduco d/dy f(x,y) = x e ottengo f(x,y) = c1(x) + x*y (qui Facciamo due esempi di soluzione, e verifichiamoli: | 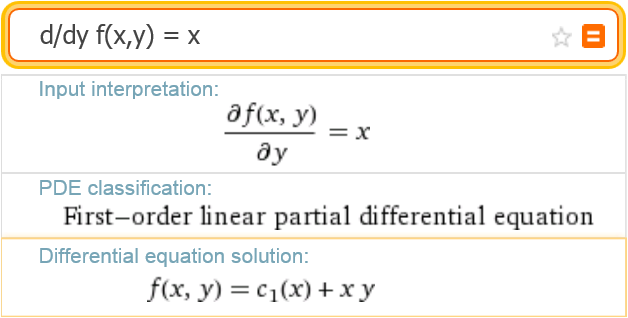 |
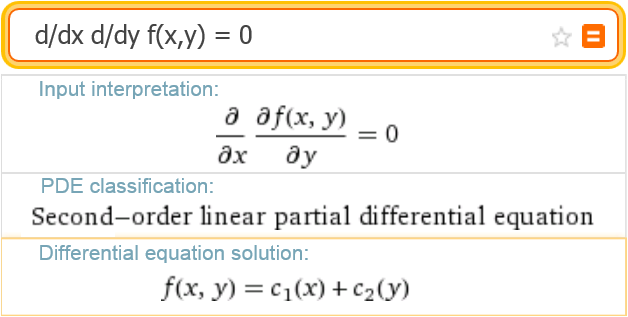
Sotto sono illustrati due altri esempi di equazioni alle derivate parziali:
Se vuoi approfondire questo argomento vedi qui.
6. Esercizi
|
So che g'(x) = 10, h'(x) = −5, k'(x) = −x + 0.3. Che cosa posso dire sul valore di
|
| Risolvi con WolframAlpha il problema f'(x) = 4*f(x), f(0) = 1 e, poi, giustifica la risposta ottenuta senza far ricorso al computer. |
|
Un razzo, dopo 60 secondi dal lancio, sta muovendosi verticalmente con l'accelerazione costante di 20 m/s², che, da quell'istante, mantiene per almeno un
paio di minuti. È alla quota di 20 mila metri dal suolo, e, in quell'istante, ha una velocità di salita di 1000 m/s.
Quale quota raggiunge dopo un altro minuto e mezzo? Che velocità ha in quell'istante? [risolvi il problema con WolframAlpha e
indica gli input che hai dato al programma; devi ottenere |
| Qual è la funzione y(x) tale che y'(x)=(1+x^2)/x^2, y(-2)=0? Qual è l'intervallo di massima ampiezza in cui essa è definita? |
| Risolvi con WolframAlpha il problema y"(x)=sin(x), y(π)=2, y'(π)=−1 e verifica, a mano, la soluzione trovata. Saresti stato in grado di risolvere il problema senza usare WolframAlpha? Come? |
| Risolvi con WolframAlpha il problema y"(x)=cos(x), y(0)=0, y'(0)=1 e verifica, a mano, la soluzione trovata. Saresti stato in grado di risolvere il problema senza usare WolframAlpha? Come? |
|
Data l'equazione differenziale y'(x) = 1+x/(y(x)^2+1) tracciane il campo direzionale in |
|
Data l'equazione differenziale y'(x) = (y-x)/(x-4*y) tracciane il campo direzionale in |
|  |
 |
| |||
 | ||||
|
1) Segna con l'evidenziatore, nelle parti della scheda indicate, frasi e/o formule che descrivono il significato dei seguenti termini: equazione differenziale (§1), modello differenziale (§1), 2) Su un foglio da "quadernone", nella prima facciata, esemplifica l'uso di ciascuno dei concetti sopra elencati mediante una frase in cui esso venga impiegato. 3) Nella seconda facciata riassumi in modo discorsivo (senza formule, come in una descrizione "al telefono") il contenuto della scheda (non fare un elenco di argomenti, ma cerca di far capire il "filo del discorso"). |